TaxiBot : informatique débranchée automatisée
 Développé pour la Fête de la Science 2019, par l’Association POBOT, Club de Robotique Sophia Antipolis, TaxiBot est un dispositif support à des ateliers d’initiation des plus jeunes aux bases de l’algorithmique, mais en mode 100% débranché. Aucun dispositif numérique (ordinateur, tablette…) ni même électronique n’est manipulé par les utilisateurs.
Développé pour la Fête de la Science 2019, par l’Association POBOT, Club de Robotique Sophia Antipolis, TaxiBot est un dispositif support à des ateliers d’initiation des plus jeunes aux bases de l’algorithmique, mais en mode 100% débranché. Aucun dispositif numérique (ordinateur, tablette…) ni même électronique n’est manipulé par les utilisateurs.
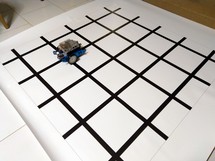
Au lieu de cela, de simples cartes disposées sur un plateau permettent de donner des instructions de route à un robot figurant un taxi évoluant dans une grande ville.
L’interprétation des programmes réalisés par les utilisateurs est confiée à une caméra et à une chaîne de traitement d’image.
Différents niveaux de lectures sont offerts par ce dispositif:
• l’initiation aux concepts de séquence, d’itération et d’appel de procédure pour les plus jeunes
• les techniques d’optimisation, en proposant des challenges consistant à réaliser un programme donné avec le moins de cartes possible
• la présentation de techniques utilisées en traitement d’image et reconnaissance de formes.
L’ensemble du dispositif a été construit intégralement en carton issu de calendriers muraux et en divers matériaux de récupération. Les cartes comme le plateau sont totalement dépourvus d’électronique et donc très simples à reproduire.
 Une Rapsberry Pi opère en coulisse, et assure les fonctions suivantes:
Une Rapsberry Pi opère en coulisse, et assure les fonctions suivantes:
-
traitement des images du plateau de programmation et production du programme de déplacement du robot
-
contrôle à distance du robot par liaison radio
-
serveur Web pour l’interface utilisateur de contrôle par l’animateur.
Le robot est un mBot (MakeBlock) légèrement modifié pour l’équiper d’une liaison radio XBee, plus simple à mettre en oeuvre et fiable que le module Bluetooth standard.
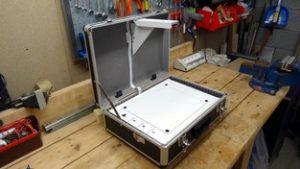
L’ensemble du matériel est intégré dans une valise à outil, qui sert également pour le transport du robot et des accessoires. Le terrain d’évolution est imprimé sur vinyle souple, transporté dans un tube ad-hoc réalisé dans un morceau de tuyau PVC pour descente de gouttière.
Détails du dispositif
Présentation des étapes du traitement d’image |
Affichage du résultat d’analyse du programme |
Contrôle du robot et visualisation des capteurs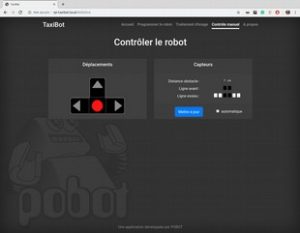 |
Vue du mBot modifié |
Vue de la valise et de son contenu
 |
 |
 |
 |
 |
 |
Utilisation de taxiBot à la Fête de la Science 2019
 |
 |
 |
 |
Dernière modification : avril 2021.