
Projet « Robotique » – Séance 6 Programmer le lièvre et la tortue
1, 2, 3, codez ! - Activités cycle 4 - Projet « Robotique » - Séance 6 : Programmer le lièvre et la tortue
|
Discipline dominante |
Technologie |
|
Résumé |
La première simulation de circulation routière des élèves reprend le thème d’une fable de La Fontaine. Il n’y a pas de véritable enjeu tant que le lièvre et la tortue sont sur des pistes séparées. En revanche, lorsqu’ils partagent la même piste, les élèves doivent prévenir les accidents. |
|
Matériel |
Pour la classe :
Par groupe :
|
Situation déclenchante
Le professeur propose de revivre la fable « le lièvre et la tortue » de Jean de La Fontaine : il y a deux pistes dégradées, parallèles, et il faut programmer deux suiveurs de piste, avec des vitesses de croisière différentes. Il est préférable de colorer le Thymio suiveur « lent » et le Thymio suiveur « rapide » de façon différente pour bien les distinguer. Le professeur gèrera le suiveur « lent », tandis que chaque groupe programmera son suiveur « rapide ».
Les élèves arrivent rapidement à deux programmes similaires :
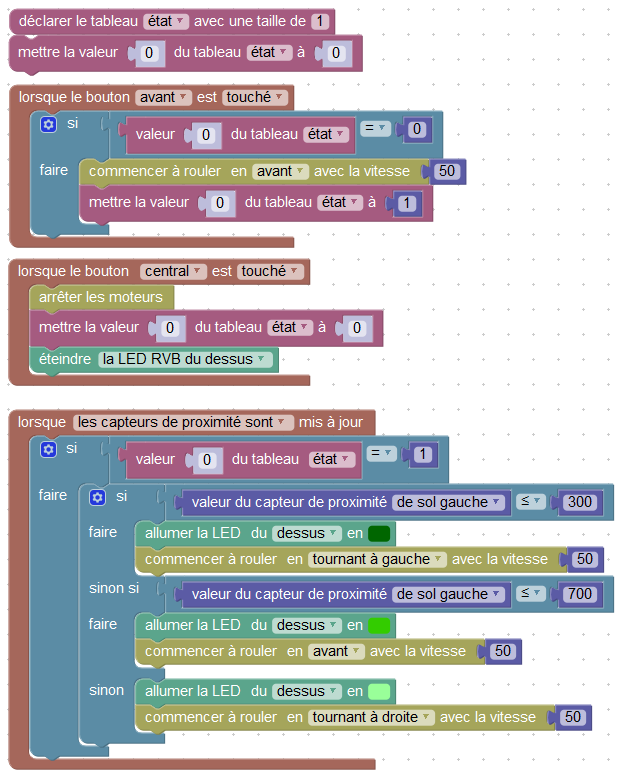 Programme de la tortue |
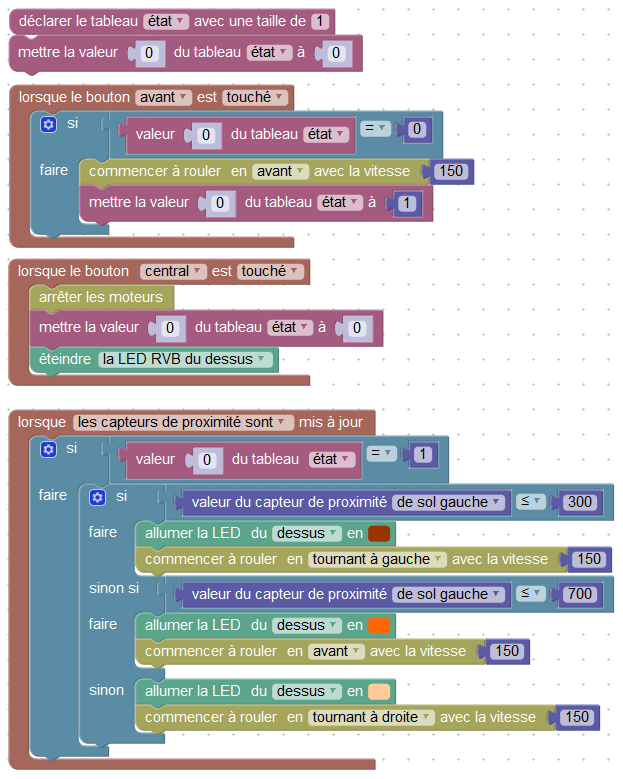 Programme du lièvre |
Les groupes organisent une course sur les deux pistes parallèles, et sauf erreurs de programmation (bugs) ou aléas de l’environnement (pli d’un papier, défaut d’impression de la piste, etc…), le lièvre arrive toujours le premier.
Maintenant, le professeur retire une des deux pistes, et annonce que, comme dans la fable, le lièvre laisse de l’avance à la tortue avant de partir. Que va-t-il se passer ?
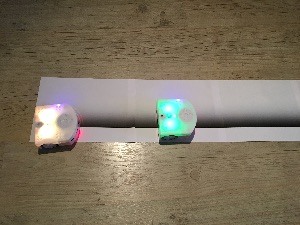
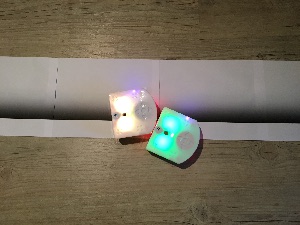
À gauche : situation initiale, la tortue (en vert) a un peu
d’avance sur la piste unique, le lièvre (en orange) la suit de peu. À
droite : le lièvre a rattrapé la tortue et cause un accident en la
poussant sur le bas-côté.
Evidemment, le lièvre rattrape la tortue et cause un accident : selon les cas, il la pousse jusqu’à la ligne d’arrivée, la fait dévier vers le fossé, dévie lui aussi, etc.
Le défi proposé aux élèves permet de gérer ce problème.
Défi : le lièvre rattrape la tortue sans causer d’accident (par groupes)
Le professeur demande alors : dans une situation automobile, comment peut-on gérer ce problème ?
Les élèves proposent en particulier de freiner, ou d’adapter sa
vitesse. Le professeur propose alors à chaque groupe d’appliquer chacune
des deux méthodes, en commençant par le freinage.
A chaque fois, les élèves sont encouragés à mettre au propre leur algorithme avant de se lancer dans la programmation.
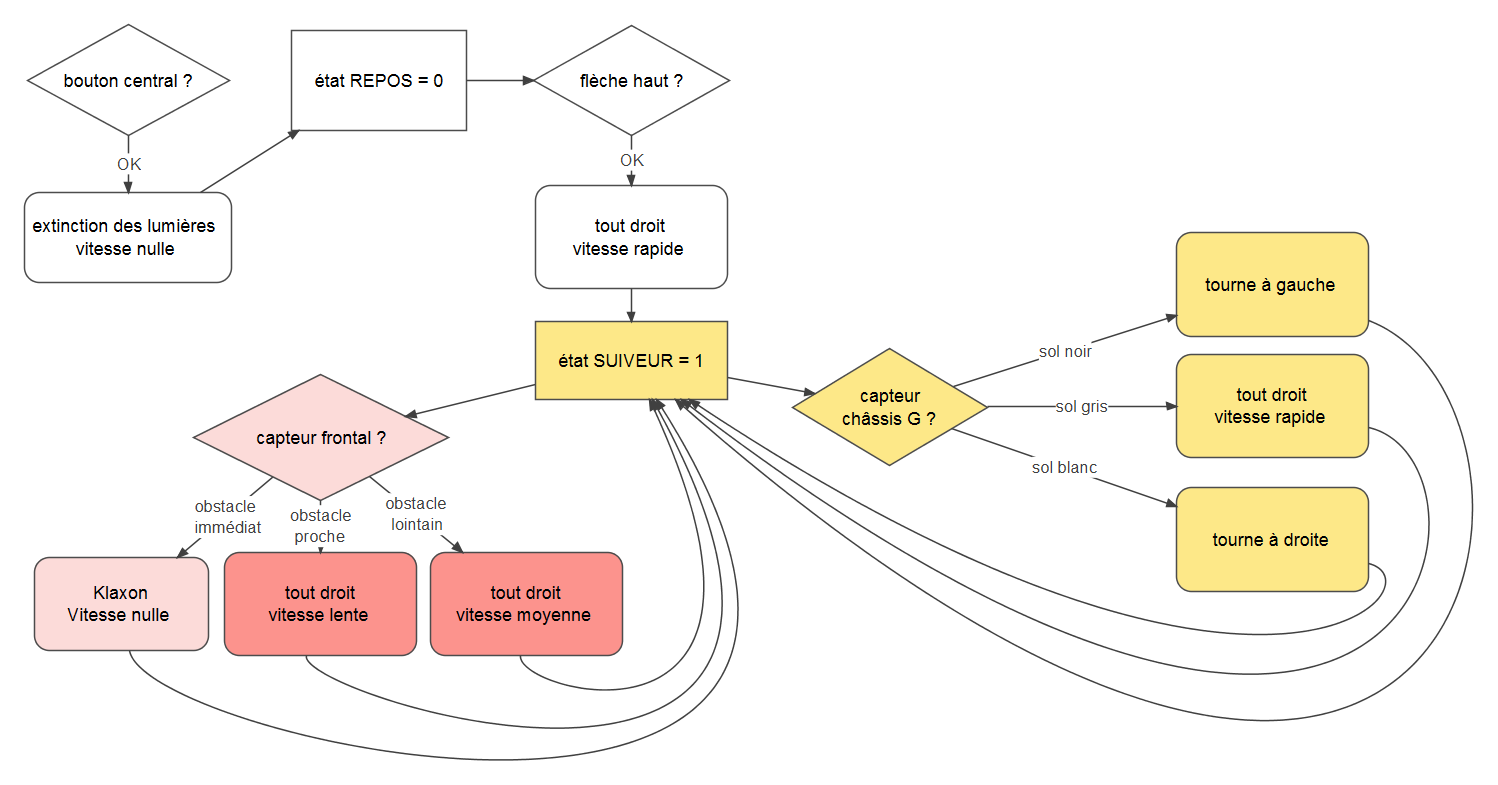
Exemple de logigramme incluant le mode SUIVEUR (en jaune) avec deux
options de réaction face à l’obstacle : freinage d’urgence (rose)
ou adaptation de la vitesse (rouge)
Note pédagogique :
Nous conseillons à tous les groupes de commencer par la
programmation du freinage d’urgence même s’ils ont envisagé des
solutions plus fines. En effet, le freinage permet une première approche
de l’utilisation des capteurs frontaux, qui sera approfondie lors de la
programmation de la seconde solution.
Solution 1 : freinage d’urgence
Une première solution consiste à piler net devant l’obstacle. Si c’est déconseillé en ASSR [Attestation scolaire de sécurité routière], c’est la solution la plus rapide à programmer.
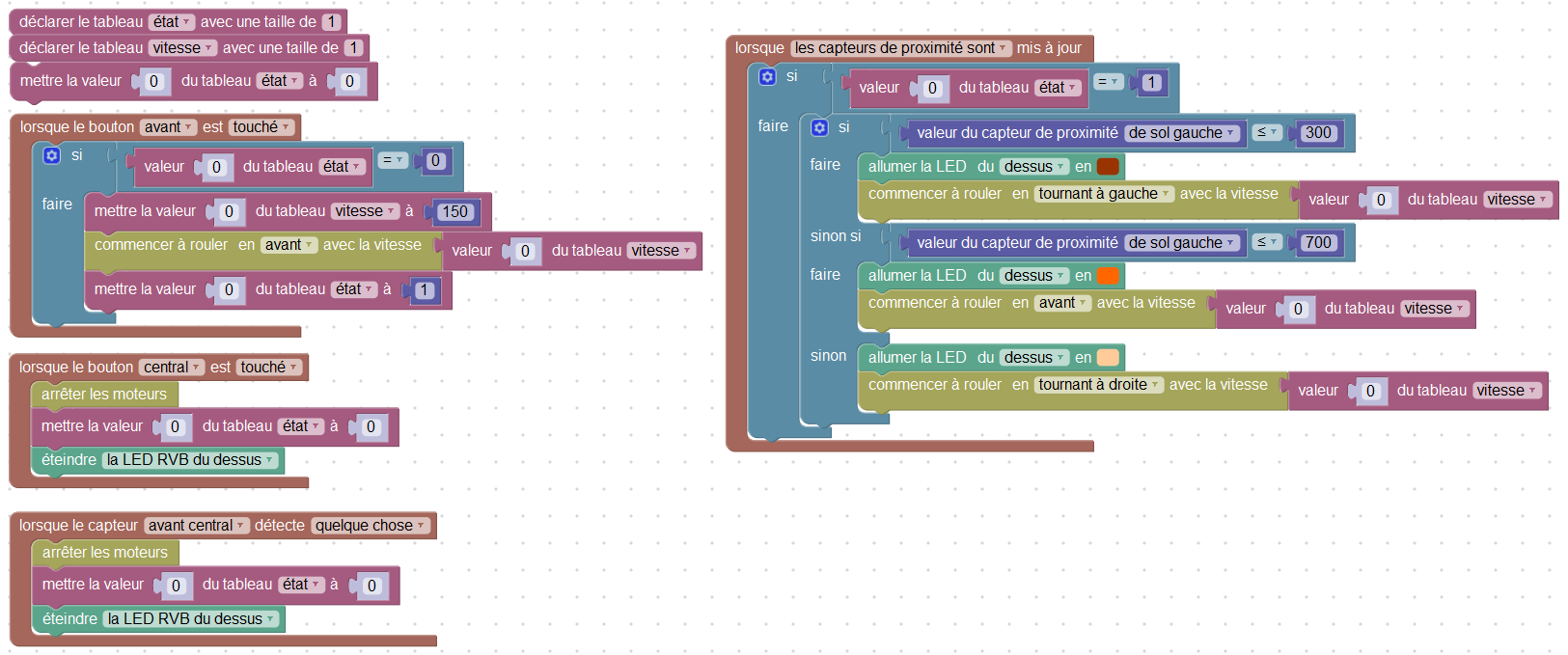
Seul le bloc en bas à gauche est nouveau.
Solution 2 : suivre la tortue
Une seconde solution est d’adapter sa vitesse à celle de la tortue, en gardant une distance de sécurité. Là encore, il faut faire plusieurs essais pour bien jauger la sensibilité du capteur avant. Il est tout à fait possible (et encouragé) d’utiliser l’écran d’Aseba Studio qui reste inactif en arrière-plan à bon escient : si, avant de « Démarrer Blockly », on déplie d’office les onglets prox.horizontal (capteurs 5+2) et prox.ground.delta (2 capteurs de châssis) dans Aseba Studio, on peut lire en temps réel les valeurs retournées par les capteurs.
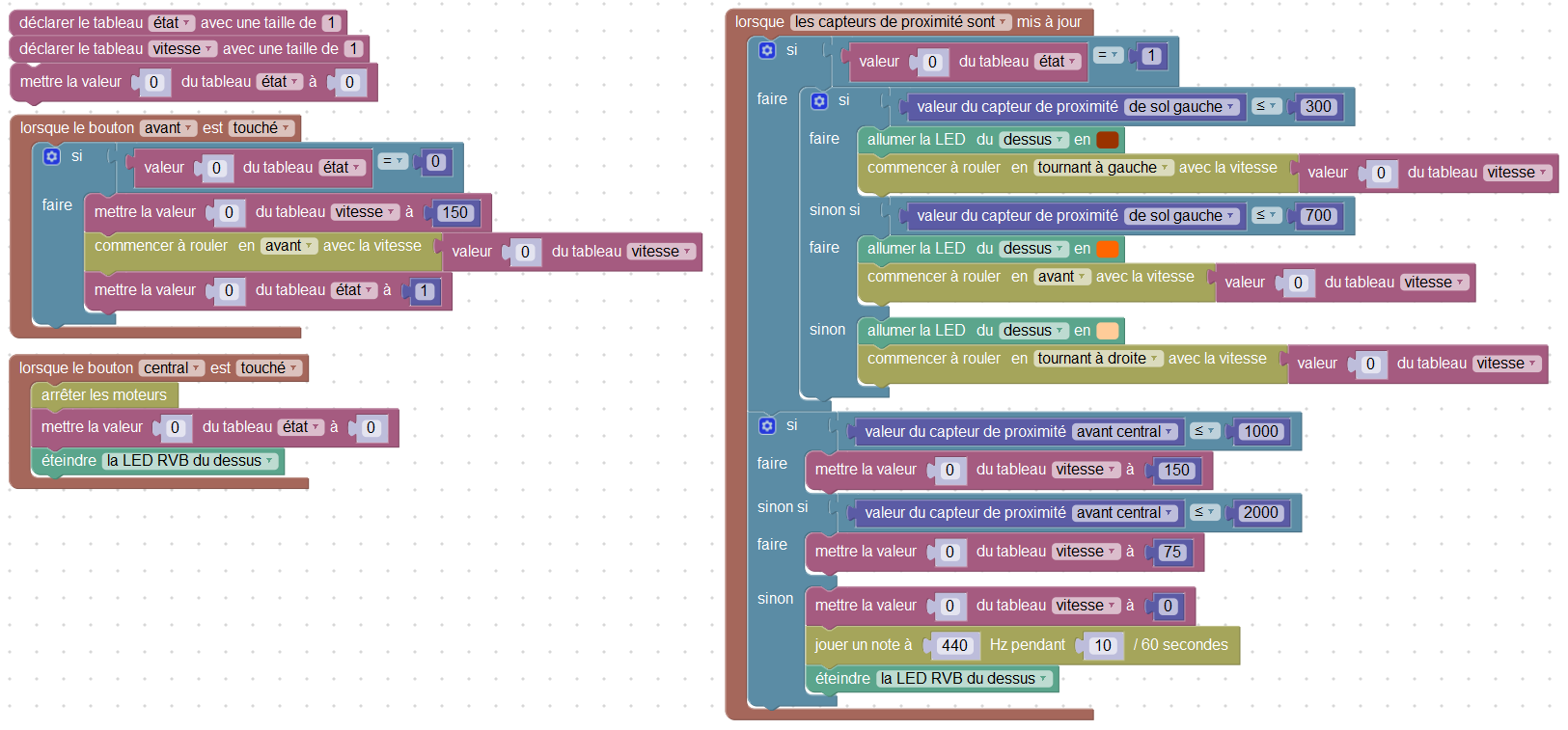
Dans la correction proposée ci-dessus, le lièvre ralentit lorsqu’il se
rapproche trop de la tortue, jusqu’à piler et klaxonner s’il s’en
approche trop.
Note pédagogique :
Encore une fois, il n’est pas demandé de reproduire le
comportement du Thymio « amical » (mode préprogrammé vert) car
ce mode est plus subtil qu’il n’y parait : Thymio est capable
d’adapter sa vitesse en fonction de la position, mais aussi de la
vitesse de l’obstacle. Ici, les élèves doivent comprendre le principe de
la programmation plus qu’aboutir à des programmes parfaits.
Conclusion
Avec ces nouvelles conditions, l’accident est évité, mais le lièvre
est furieux. Que se passe-t-il dans la vraie vie, sur la route, dans des
situations similaires ?
Les élèves répondent vite : le véhicule rapide cherche à doubler le véhicule lent. Ce sera l’objet de la séance suivante.
Pour l’instant, les élèves reproduisent le logigramme du lièvre dans leur carnet de projet.
Extrait de "1, 2, 3... codez !", Editions Le Pommier, 2016-2017. Publié sous licence CC by-nc-nd 3.0.