
Eclairage scientifique – Les robots
1, 2, 3, codez ! - Eclairage scientifique - Les robots
Parmi les objets qui embarquent des ordinateurs, les « robots » ont une importance scientifique, sociétale et économique grandissante. Les robots sont partout : dans les usines et dans les champs, au fond des mers et dans l’espace, dans les jardins et les salons. En outre, ils ont pénétré notre culture et certains d’entre eux participent au renouvellement de la vision que nous avons de nous-même.
 |
 |
 |
 |
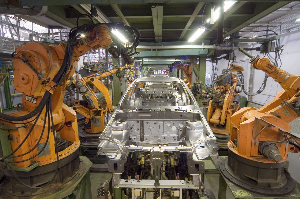
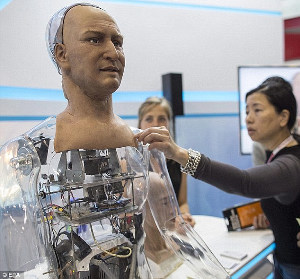
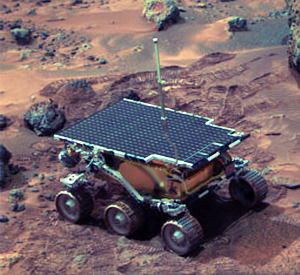
Quelques exemples de robots. De gauche à droite et de bas en haut :
bras mécaniques utilisés dans l’industrie automobile ;
robot humanoïde dédié à la reconnaissance et à la reproduction des émotions ;
robot explorateur sur Mars ;
robot militaire destiné à transporter des charges lourdes sur des terrains accidentés.
D’un point de vue technique, un robot
est une machine dotée de capteurs (de contact, de distance, de couleur,
de force, …) qui lui permettent de percevoir son environnement, de
moteurs l’autorisant à bouger et à agir sur cet environnement, et d’un
système qui contrôle ce qu’effectue le robot en fonction de ce qu’il
perçoit. Une caractéristique fondamentale des robots, qui les distingue
des automates, est cette rétroaction entre perception et action. Les
automates (tels que ceux de Jacques de Vaucanson ou de Pierre et
Henri-Louis Jaquet-Droz au XVIIIe siècle) ne sont pas des robots car
leurs mouvements ne dépendent pas de ce qui se passe autour d’eux : ils
n’ont pas de capteurs et leurs enchainements sont entièrement
prédéterminés par le programme.
En pratique, cette définition d’un robot recouvre une très vaste
diversité de machines : les bras articulés programmables des usines
automobiles, les voitures (en mode d’assistance à la conduite) et les
avions qui sont aujourd’hui largement automatisés, les aspirateurs qui
font le ménage tout seuls, certains objets électroniques des magasins de
jouets, ou les robots biomimétiques en forme d’animaux (singes,
poissons…) que l’on rencontre parfois dans les laboratoires de
recherche.
Cette diversité n’est pas seulement une diversité de formes, c’est
aussi une diversité d’usages, qui sous-tendent une diversité de logiques
de fonctionnement. Ainsi, les robots se spécialisent selon deux axes
majeurs : l’autonomie et les capacités d’adaptation et/ou
d’apprentissage.
L’autonomie : il existe des robots qui agissent sans qu’un humain les guide, et d’autres dont le comportement est, soit influencé par un humain, soit presque totalement contrôlé par un humain. Par exemple, dans une usine, les robots qui travaillent à la chaine et répètent toujours le même geste le font souvent de manière autonome. En revanche, les robots utilisés dans les centrales nucléaires (pour opérer dans les zones à forte radiation) sont typiquement téléguidés par un humain qui leur dit où aller et quoi faire après chaque action.
L’adaptation et l’apprentissage : le comportement de certains robots est figé au départ et une fois pour toutes par le programmeur, alors que d’autres robots sont capables d’acquérir de nouveaux comportements et de nouvelles connaissances par leurs expériences : leur comportement évolue en fonction de l’histoire de leurs interactions avec l’environnement. Ainsi, certains robots sont capables d’apprendre à reconnaître des objets dans des images ou encore d’apprendre à marcher en expérimentant et évaluant eux-mêmes différentes stratégies. Ces mécanismes d’adaptation sont permis par des « algorithmes d’apprentissage », qui reposent sur la détection automatique de régularités dans des flux de données captées par le robot, et sur des méthodes d’ « optimisation » permettant de raffiner de manière progressive et itérative les paramètres des solutions à un problème.
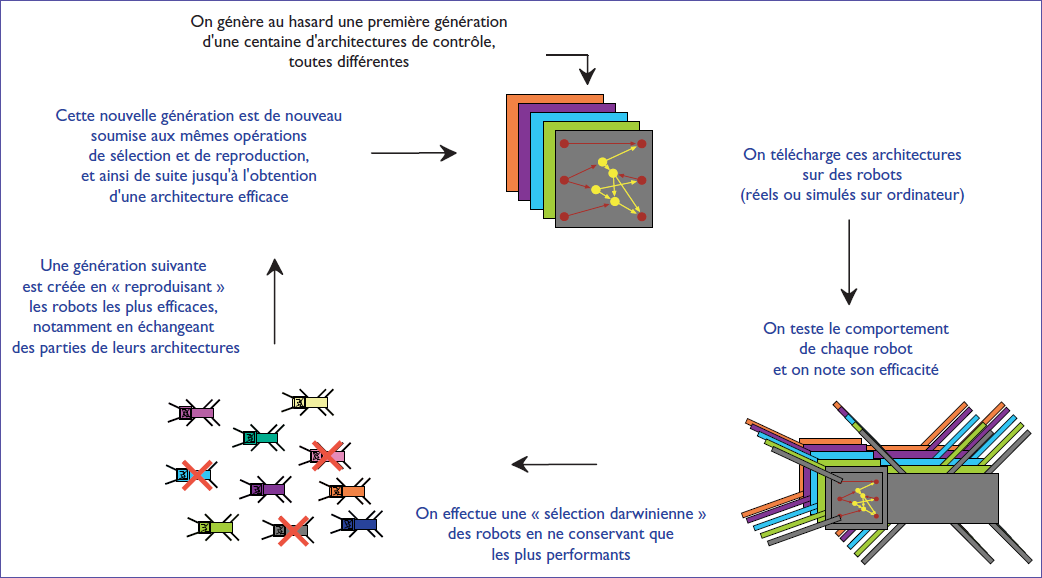
Exemple de processus itératif permettant à des « générations » de robot
d’apprendre à réaliser une tâche par eux-mêmes (par exemple, se
déplacer).
Grâce à ces algorithmes d’apprentissage, certains robots sont capables d’inventer des solutions et des comportements non prédits par leur concepteur, et même de sélectionner pour eux-mêmes des objectifs qui ne sont pas préprogrammés. Il est par exemple possible de programmer un robot en lui donnant des instructions lui demandant de rechercher des situations nouvelles afin d’augmenter ses connaissances sur le monde qui l’entoure. Ainsi, certains algorithmes permettent de doter ces machines de formes d’apprentissage et de créativité. Néanmoins, les capacités et les performances de ces algorithmes sont aujourd’hui, et encore pour très longtemps probablement, très faibles en comparaison des capacités d’adaptation et de raisonnement de nombreux animaux, et en particulier de l’humain.
Comme nous l’avons vu, ces différentes logiques de fonctionnement répondent à différents besoins : il existe en effet une grande variété de raisons, et donc de fonctions, pour lesquelles les robots sont construits et utilisés. On peut en particulier considérer trois familles de fonctions : travailler et explorer, assister l’humain, modéliser les mécanismes cognitifs et comportementaux du vivant.
Travailler et explorer.
La plupart des robots en service dans le monde sont industriels (on en compte aujourd’hui environ 9 millions). Très tôt, les entreprises se sont intéressées à ces machines pour deux raisons :
- D’abord, les robots peuvent être utilisés pour remplacer les travailleurs humains dans les tâches répétitives, pénibles et nécessitant de faibles compétences, comme les montages, la peinture ou les soudures de pièces ;
- En outre, ces machines sont capables de réaliser des travaux à la chaine bien plus rapidement et efficacement que les humains.
Le premier robot industriel, Unimate,
est apparu en 1961 : installé dans une usine automobile de General
Motors, ce bras articulé manipulait de lourdes pièces de fonderie. Dans
les années 1970, l’usage des robots dans l’industrie a pris son
envol. Aujourd’hui, les robots ont pénétré toutes les branches de
l’industrie et ne sont plus restreints au seul secteur de l’automobile.
Par exemple, dans l’agriculture et l’agro-alimentaire, les robots vont
dans les champs cueillir fruits et légumes, certains coupent, pressent
et mettent en bouteille ; d’autres trient et mettent en cartons ;
d’autres encore groupent en palettes. Dans certains aéroports, des
flottes de robots s’occupent de transporter les bagages et de les
charger dans les soutes.
Les robots ne sont pas seulement utiles dans l’industrie pour les
tâches simples et répétitives, ils sont aussi utilisés pour travailler
dans des environnements dangereux pour l’homme. L’industrie nucléaire
est un exemple typique. Qu’ils soient autonomes ou partiellement
téléguidés, les robots des centrales nucléaires peuvent déambuler dans
les enceintes confinées et radioactives, ils peuvent manipuler les
substances dangereuses et s’occuper de la maintenance des autres
machines. Un autre exemple est l’industrie pétrolière : les robots
sous-marins sont par exemple utilisés pour contrôler l’état de la coque
des navires afin de prévenir les accidents et d’identifier les « navires
poubelles ».
Les robots sont enfin cruciaux pour l’exploration des endroits où
l’homme ne peut pas aller, au premier rang desquels l’espace et les
corps du Système solaire. C’est en 1966 que le premier robot mobile
arrive sur la Lune, embarqué dans la sonde Surveyor. Suivront le soviétique Lunokhod, puis toute la série des américains Mariner. En 1997, un robot atterrit sur la planète Mars : Sojourner,
qui est propulsé par l’énergie qu’il capte grâce à ses panneaux
solaires ; il envoie à la Terre des milliers de clichés et provoque un
engouement du grand public. Sojourner navigue en partie de manière
autonome car, étant donné la distance avec la Terre, il est très
difficile de le téléguider en temps réel. En 2004, une nouvelle mission
robotisée concentre l’attention du monde entier : Spirit et Opportunity,
équipés de spectromètres et d’un bras qui leur permet de creuser la
surface, apportent la preuve que de l’eau a coulé sur Mars.
Assister l’humain dans son quotidien.
| Si le XXe siècle a vu l’avènement des robots travailleurs et explorateurs, à l’aube du XXIe siècle, une autre grande famille de robots prend son essor : les robots d’assistance à la personne. Dans nos maisons, les robots d’assistance aux travaux ménagers se démocratisent. On retrouve aussi des assistants robotisés dans les magasins ou sur nos lieux de travail. L’activité médicale est particulièrement transformée par la robotique : si les robots d’assistance chirurgicale sont quotidiennement utilisés depuis une quinzaine d’années, on voit émerger aujourd’hui de nouveaux usages. Ainsi, des robots accompagnent les personnes qui ont des difficultés physiques ou cognitives, par exemple pour les aider à se lever et s’asseoir, pour les stimuler cognitivement quand ils ont des problèmes de mémoire, ou pour jouer le rôle de facilitateur des contacts avec la famille ou l’entourage médical. Demain, des chercheurs introduiront d’autres robots, beaucoup plus petits, dans les blocs opératoires : ce sont des capsules endoscopiques miniaturisées capables d’explorer conduits intestinaux, artères ou veines pour aider le chirurgien dans son diagnostic. Apparaissent aussi depuis quelques années des prothèses robotisées de mains ou de bras entiers destinées aux amputés. |  Prothèse robotisée. ©BeBionic |
Modéliser le vivant et la cognition.
Les robots sont devenus essentiels comme outils pour penser et modéliser les systèmes complexes dans le domaine du vivant. En particulier, les robots sont aujourd’hui utilisés dans des laboratoires de recherche pour comprendre comment les êtres vivants s’adaptent à leur environnement naturel, en termes de comportement et de déploiement de capacités cognitives. En effet, ce comportement est le résultat de la dynamique des interactions entre un cerveau, un corps physique et un environnement, dynamique qui se redéfinit en permanence car le cerveau est modifié à chaque nouvelle interaction. Les robots embarquent à la fois un « cerveau » (des programmes qui permettent de traiter l’information acquise par le robot, selon des règles précises), des « organes sensoriels » (les senseurs) et des « systèmes moteurs » (les actuateurs). De cette manière, les robots peuvent, comme les êtres vivants, modifier et être modifiés par l’environnement physique dans lequel ils agissent. Leur « cerveau » aussi en est modifié, car le robot acquiert de nouvelles connaissances qu’il peut réutiliser dans ses interactions successives.
| Les chercheurs peuvent étudier la complexité de l’interaction cerveau-corps-environnement, grâce à des expérimentations possibles sur des robots et impossibles sur des êtres vivants – comme par exemple « éteindre » une partie de leur cerveau artificiel pour voir comment le comportement est modifié ou altérer des parties du corps. Certains laboratoires étudient ainsi le contrôle moteur, la perception visuelle, le repérage dans l’espace, ou encore les mécanismes de l’apprentissage et de l’évolution de la parole et du langage chez l’humain. Dans le cadre de ces projets, les interactions avec les neurosciences, la biologie, la psychologie ou encore l’éthologie jouent un rôle central. | 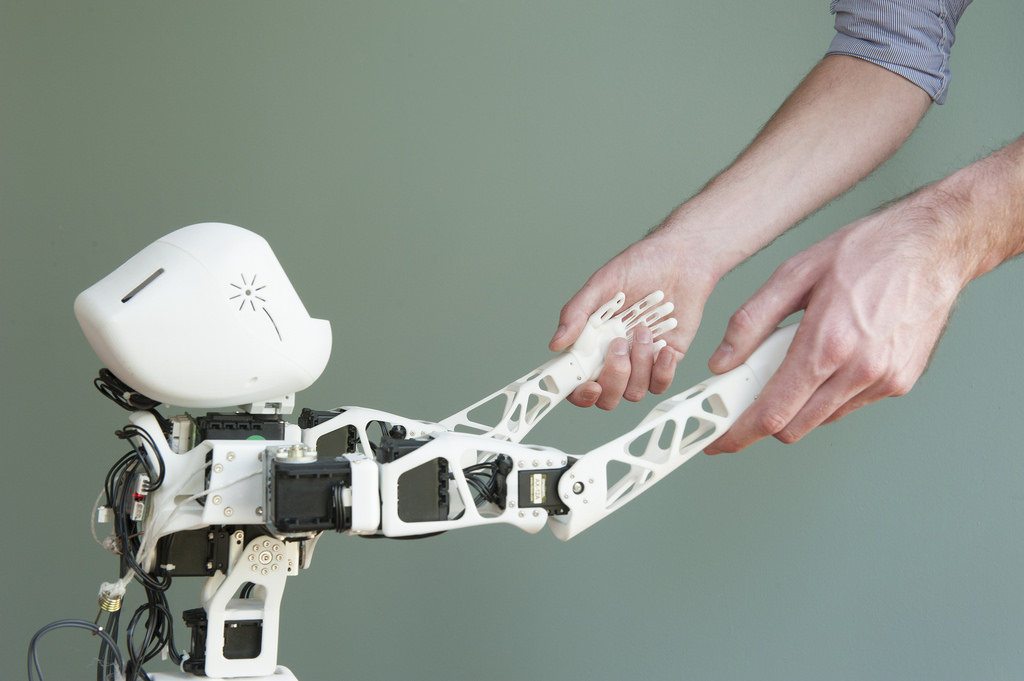 Le robot humanoïde Poppy est « open source ». Il est développé par l’Inria à la fois pour des recherches sur la cognition et pour des projets éducatifs. Plus de détails sur : https://www.poppy-project.org |
Extrait de "1, 2, 3... codez !", Editions Le Pommier, 2016-2017. Publié sous licence CC by-nc-nd 3.0.